Αρχική Σελιδα Προηγούμενη Σελίδα Prof. Theodore Pachidis's Home Page Αρχιτεκτονική HumanPT και Ρομποτική Εφαρμογή HumanPT
|
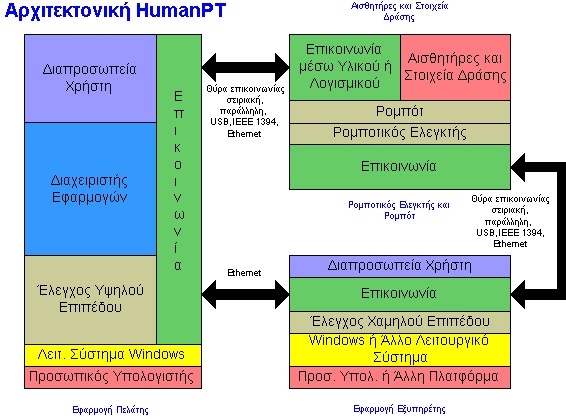
| Εισάγεται μια νέα αρχιτεκτονική, με την ονομασία HumanPT, η οποία εκμεταλλεύεται τα ελάχιστα στοιχεία επικοινωνίας που παρέχουν τα περισσότερα, γενικά κλειστού τύπου, ρομποτικά συστήματα και επιτρέπει την ανάπτυξη λογισμικού για ρομποτικές εφαρμογές. Αναπτύσσεται σε δύο ταυτόχρονα πλατφόρμες εκ των οποίων η μία χρησιμοποιείται ως πλατφόρμα-εξυπηρέτης ενώ η δεύτερη ως πλατφόρμα-πελάτης. Η πλατφόρμα-πελάτης είναι προσωπικός υπολογιστής ενώ η πλατφόρμα-εξυπηρέτης μπορεί να είναι οποιαδήποτε (ακόμη και ο ρομποτικός ελεγκτής που συνοδεύει το ρομπότ) εξυπηρετώντας με τον τρόπο αυτό τις ανάγκες διασύνδεσης με το ρομποτικό σύστημα. Για την αρχιτεκτονική αυτή παρουσιάζονται τα επίπεδα από τα οποία αποτελείται, για κάθε πλατφόρμα ξεχωριστά, καθώς και η λειτουργικότητά τους. Το λογισμικό που αναπτύσσεται με τη βοήθεια της προτεινόμενης αρχιτεκτονικής εκτελείται σε προσωπικούς υπολογιστές και βασίζεται στο περισσότερο διαδεδομένο λειτουργικό σύστημα, τα Windows της Microsoft (στην πλατφόρμα-πελάτη ή και στην πλατφόρμα-εξυπηρέτη ανάλογα με το ρομποτικό σύστημα). Με τον τρόπο αυτό οι εφαρμογές είναι περισσότερο φιλικές προς τον χρήστη και επιτρέπουν τη χρήση ενός ρομποτικού συστήματος ακόμη και από μικρές παραγωγικές μονάδες σε διαδικασίες αυτοματισμού και εφαρμογές όπως η ηλεκτροσυγκόλληση μετάλλων, η βαφή, η επεξεργασία, η συναρμολόγηση κ.τ.λ. Η αρχιτεκτονική HumanPT επιτρέπει τη χρήση αισθητήριας πληροφορίας παρέχοντας έτσι τη δυνατότητα δημιουργίας συστημάτων περισσότερο αξιόπιστων, ακριβέστερων και εύκολα προσαρμόσιμων στις διαφορετικές συνθήκες που καθορίζονται από τη φύση των διαφορετικών εργασιών ή διεργασιών. Επιπλέον εξασφαλίζει την εύκολη προσαρμογή των ρομποτικών εφαρμογών σε διαφορετικά ρομποτικά συστήματα με την τροποποίηση ενός μόνο μικρού τμήματος του κώδικά τους. Ο έλεγχος του ρομποτικού συστήματος μέσω ενός τοπικού δικτύου ή του διαδικτύου επιτρέπει την ολοκλήρωση εργασιών σε περιβάλλοντα μη φιλικά προς τον χρήστη ή απομακρυσμένων στα οποία δεν υπάρχει η δυνατότητα πρόσβασης. | |
|
|
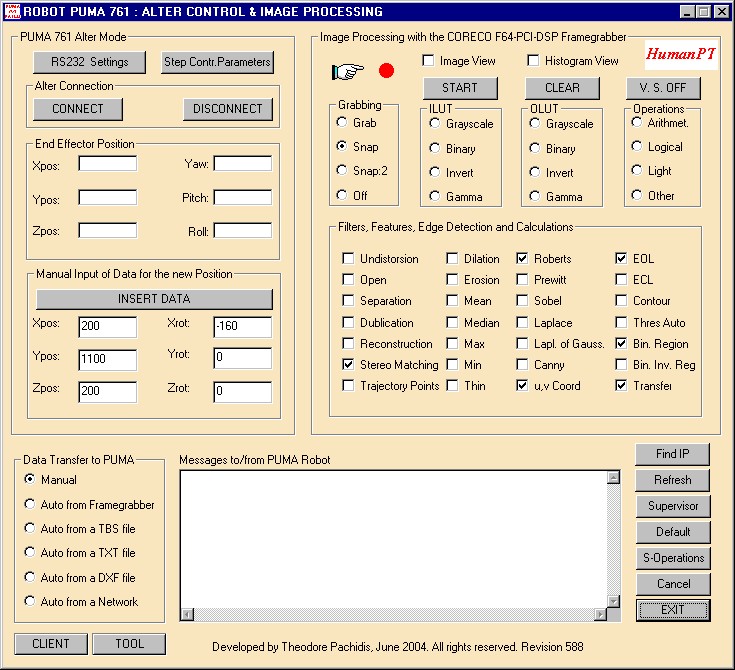
| Στο πλαίσιο αυτής της αρχιτεκτονικής αναπτύχθηκε και παρουσιάζεται η δομή μιας νέας ρομποτικής πολυνηματικής εφαρμογής, με την ονομασία HumanPT, που εξασφαλίζει την επικοινωνία και τον έλεγχο σε πραγματικό χρόνο μέσω της θύρας ALTER του ρομποτικού βραχίονα PUMA 761. Για τη θύρα αυτή παρουσιάζονται τα προβλήματα που υπάρχουν και προτείνονται λύσεις που παρέχουν τη δυνατότητα αξιοποίησης της. Η επικοινωνία μέσω της σειριακής θύρας ALTER πραγματοποιείται για πρώτη φορά με ρυθμό 38400 bps (ο ρυθμός που προτείνεται από τη Unimation είναι 19200 bps) εξασφαλίζοντας την αξιόπιστη επικοινωνία ακόμη και με λειτουργικά συστήματα μη πραγματικού χρόνου (Windows). Η ρομποτική εφαρμογή HumanPT βασίζεται σε ένα πλήθος από μεθοδολογίες και αλγόριθμους οι οποίες προτείνονται στη διεθνή βιβλιογραφία ή νέες που προτείνονται από τον γράφοντα προκειμένου το σύστημα να αποκτήσει τα ιδιαίτερα απαιτούμενα χαρακτηριστικά τα οποία το μετατρέπουν σε σύστημα ηλεκτροσυγκόλλησης που βασίζεται σε τεχνητή όραση (μέθοδοι επεξεργασίας εικόνας, βαθμονόμησης κάμερας, δημιουργίας ρομποτικών τροχιών, δημιουργίας μονάδων και σχημάτων ελέγχου). Ωστόσο μπορεί να χρησιμοποιηθεί για την ολοκλήρωση πολλών άλλων εργασιών ή διεργασιών. Στην εφαρμογή ενσωματώθηκε ένα σημαντικό πλήθος από επιμέρους εφαρμογές που την καθιστούν φιλική προς το χρήστη. Το λογισμικό είναι μία πλήρης εφαρμογή, που αναπτύχθηκε στην αντικειμενοστραφή γλώσσα προγραμματισμού visual C++, μπορεί να χρησιμοποιηθεί αυτούσια για τον έλεγχο ενός ρομποτικού συστήματος με αισθητήρια πληροφορία από σύστημα τεχνητής όρασης, να τροποποιηθεί κατάλληλα ώστε να προσαρμοστεί στις ιδιαίτερες συνθήκες ενός άλλου ρομποτικού συστήματος ή να αποτελέσει πηγή άντλησης τμημάτων λογισμικού για άλλες ρομποτικές εφαρμογές. Η ρομποτική εφαρμογή HumanPT, δέχεται αισθητήρια πληροφορία από ένα συνηθισμένο σύστημα στερεοσκοπικής όρασης με δύο παράλληλες κάμερες και από το προτεινόμενο σύστημα στερεοσκοπικής τεχνητής όρασης που ονομάστηκε ψευδο-στερεοσκοπική διάταξη όρασης (ΨΣΔΟ). | |
|
|
|
Μπορείτε να κατεβάσετε μία περιορισμένων δυνατοτήτων έκδοση της ρομποτικής εφαρμογής HumanPT εδώ. Τα βασικά βήματα που πρέπει να ακολουθήσετε για να μπορεί να εκτελεστεί σωστά η εφαρμογή HumanPT βρίσκονται στο αρχείο HumanPT_readme . |
Αρχική Σελιδα Προηγούμενη Σελίδα Last Updated 2/2/2025
|