|
Prof. Theodore Pachidis's Home Page HumanPT Architecture and HumanPT Robotic Application
|
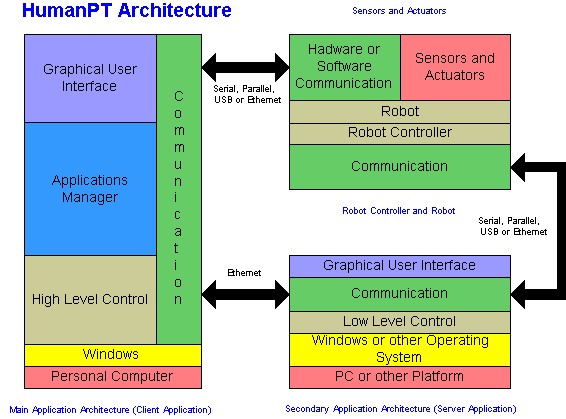
| A new
architecture is introduced, called HumanPT, which exploits the minimum communication
facilities that the most, generally closed robotic systems, provide and allow the
development of software for robotics applications. This
architecture is based on two simultaneously platforms. The first one is used as server
while the second one as client. Clients are
personal computers while the server can be any control system or computer (i.e. the
robotic controller) ensuring this way the interconnection with the robotic system in real
time. For this architecture the layers as
well as the operability of each layer for each platform are presented. The software
developed by means of the proposing architecture is executed in personal computers and is
based on the widespread OS, the Windows of Microsoft (in the client computer or even the
server computer depending on the robotic system). With this way applications are
user-friendly and they permit the use of a robotic system in small productive units
(companies) in automation procedures and applications as the metal welding, the paint, the
processing, the assembly e.t.c. HumanPT architecture allows the use of sensory information
providing thus the possibility of creation of systems more reliable, precise and easy
adaptable in the different conditions that determined by the nature of different tasks or
procedures. Moreover, this architecture ensures the easy adaptation of robotic
applications in robotic systems only modifying a small part of their code. The robotic
system control via a local network or the Internet allows the integration of tasks in
environments not user-friendly or in remote systems in which the possibility of access
does not exist. |
|
|
|
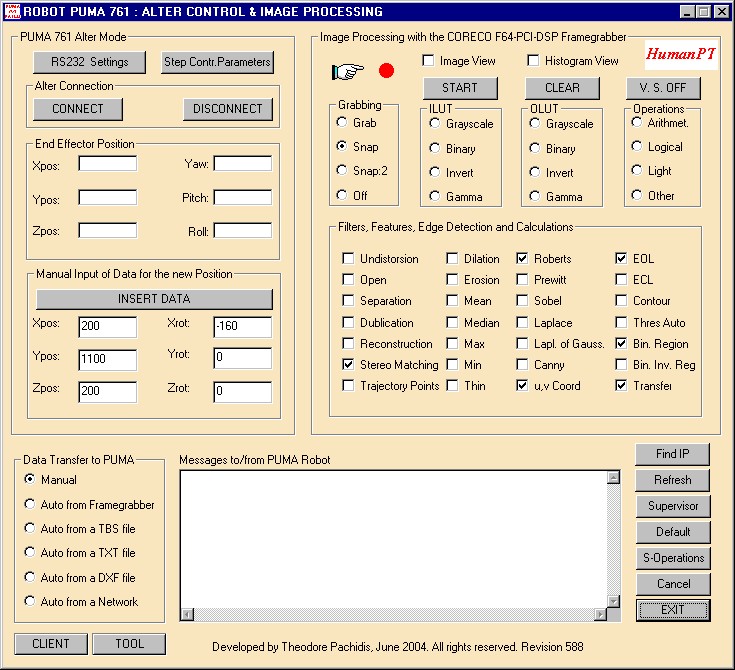
| In the frame of this architecture a new multi-threaded robotic application has been developed, called HumanPT, that ensures the communication and the control in real time through ALTER communication port of the PUMA 761 robotic manipulator. For this port existing problems are presented and solutions that provide the possibility of exploitation are proposed. The communication through ALTER port is achieved for first time at 38400 bps (the baud rate proposed by Unimation is 19200 bps) ensuring the reliable communication with non real time operating systems (like Windows). The robotic application HumanPT is based on an important number of methodologies and algorithms which are proposed in the international bibliography or novel that are proposed by the writer in order to obtain the system these special features which convert it in vision based welding system (image processing methods, camera calibration, robot path generation, generation of control units and schemes). However it can be used for the integration of many different tasks or procedures. In the application an important number of sub-applications has been added thus converting it to a user-friendly application. The software is an integrated application, that has been developed in the object-oriented programming language visual C ++, it can be used as it is for the control of a robotic system with sensory information from a vision system, it can be suitably modified so that to be adapted in the different conditions of different robotic systems or to be a source of software for different robotics applications. The robotic application HumanPT accepts sensory information from an ordinary stereovision system with two parallel cameras and from the stereovision system proposed that is called pseudo-stereovision system (PSVS). | |
|
|
|
You can download a reduced version of HumanPT robotic application here. Some basic steps to be the application HumanPT executable are found in the HumanPT_readme file. |
|
Last Updated 2/2/2025
|