|
Prof. Theodore Pachidis's Home Page Pseudo Stereo Vision System (PSVS)
|
| The
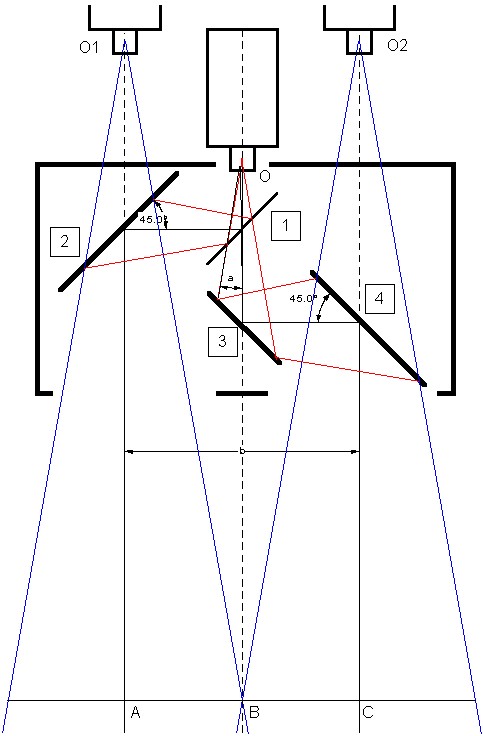
apparatus uses four mirrors. The main idea is based on using three mirrors which reflect a
100% of of their incident light and one mirror which reflects a 50% and passes the
other 50% of the incident light. Refraction phenomena disappear to first three mirrors
because the first surface of them is used (first surface mirrors). Two virtual parallel
cameras are created. These cameras are symmetrically positioned with respect to the Z axis
(optical axis of the real camera). They have the same geometric properties and parameters
(the same of the real camera). Consequently, these cameras constitute an ideal stereo
vision system with two cameras. This vision system, as it is presented here, receives in a
single shot one complex image as result of the superposition of the left and right view of
a scene.Some remarkable features of PSVS
are: 1. It has no moving parts. 2. It uses only one common CCD camera and in this way the two created virtual cameras of the stereo system have exactly the same geometric properties and parameters. 3. It receives a complex image, which is composed of a stereo pair of images, in a single shot. 4. It has the double resolution of other monocular systems and the same with an ordinary stereo system. 5. A complex image is directly processed. 6. It can be constructed in any dimensions covering every type of camera, length of baseline, accurate measurement of depth. 7. It is a relatively low cost apparatus and robust mechanically construction. Thus it can be used in any vision system. 8. Using our correspondence algorithm, it is easy to find point disparities. |
|
|
|
|
|
|
|

|
Last Updated 2/2/2025
|